
Projet STIMTAC
Stimtac est un dispositif à retour tactile similaire à un « touchpad »
Les environnements informatiques s’enrichissent de périphériques de sortie de plus en plus performants; alors que les dispositifs visuels ou auditifs sont devenus monnaie courante, l’utilisation du retour d’effort se généralise et aide les utilisateurs à interagir avec des applications informatiques.
Cependant, une stimulation spécifique de la pulpe du doigt est encore très rarement proposée par ces dispositifs. Le sens du toucher est donc encore inexploité, ce qui induit un manque de réalisme car les applications ne tirent pas profit du canal tactile. Un besoin existe donc pour un stimulateur tactile assez petit pour être posé à côté d’un ordinateur de bureau, mais assez réaliste pour simuler des surfaces de différentes textures.
Comment cela fonctionne ?
Le principe mis en œuvre est d’animer la surface touchée d’une vibration plus ou moins intense, pour restituer la sensation d’un contact plus ou moins glissant. Cette vibration, d’une fréquence ultra-sonore pour rester inaudible, affecte la totalité de la surface parallèlement à elle-même, à la manière d’une membrane de haut-parleur. Un coussin d’air (squeeze film) s’établit alors entre le doigt et la surface, et réduit le coefficient de friction de ce contact.
 Principe de base
Principe de base
Sous contrôle d’un programme, l’amplitude de la vibration est modifiée en fonction de la position du doigt pour simuler différentes textures. Voir à ce propos une démonstration où le retour haptique est doublé d’un retour audible.
Dans la pratique, il n’est pas nécessaire -et il serait très difficile- de faire vibrer à haute fréquence la surface parallèlement à elle-même. On constate qu’on peut se contenter d’entretenir par résonance une onde stationnaire dans une plaque rigide élastique, en métal par exemple. Si la longueur d’onde est assez courte (10-20mm), une amplitude maximale de 1 à 2 microns suffit pour en ressentir l’effet uniformément sur toute la surface.
 La résonance réduit la puissance nécessaire
La résonance réduit la puissance nécessaire
Historique
2004 : Les origines
Le premier prototype de stimulateur tactile (Stimtac) utilisait le stator démonté d’un moteur à ultrasons appelé USR60. Ce résonateur de forme circulaire est capable de produire des vibrations de 3 microns d’amplitude à une fréquence de 40 kHz. Un ruban de plastique y était collé, pour aplanir la face efleurée, et éliminer l’effet de denture du stator original. Un Transformateur Différentiel Variable Linéaire (LVDT) était utilisé pour capter la position du doigt. Cette solution était loin d’être optimale : capteur uni-dimensionnel, en contact avec le doigt, et ne mesurant pas précisément la position du contact du doigt.
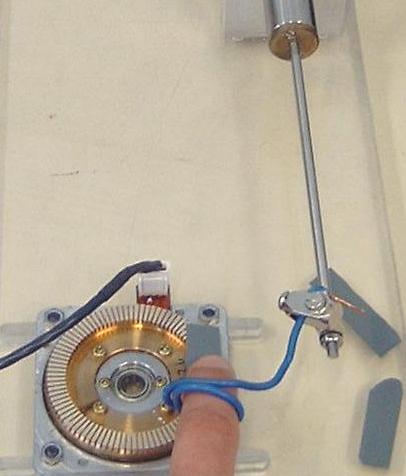 2004 : stator de USR60
2004 : stator de USR60
 2007 : fabriqué au laboratoire
2007 : fabriqué au laboratoire
2007 : Premiers prototypes réalisés au laboratoire
L’idée derrière Stimtac est de produire un dispositif tactile qui produise une stimulation de bon rendu tactile, et qui soit aussi petit que possible. L’effet « squeeze film » (pellicule d’air pincée) est le phénomène se produisant entre la plaque en vibration et l’extrémité du doigt. Un prototype spécifique a été développé. L’étude a abouti à une plaque sur laquelle est entretenue une onde stationnaire à l’aide d’actionneurs piézoélectriques. Ses dimensions ont été déterminées pour favoriser l’effet « squeeze film ».
2008 : Un stimulateur tactile
Pour son fonctionnement, le Stimtac a besoin d’une mesure précise de la position du doigt. Pour se passer du capteur LVDT, un capteur optique « sur mesure » a été utilisé pour localiser le doigt de l’utilisateur. Ce capteur fait appel à deux DEL blanches, un jeu de miroirs et un réseau CCD de 200 ppp. Un DSP embarqué calcule les centroïdes de deux ombres produites par le doigt et les envoie sur une ligne série comme des coordonnées absolues (x,y) à un taux de 120 éch/sec. La résolution finale du capteur est de l’ordre de 170 ppp en raison de contraintes optiques et de post-traitements.
 2008 : le stimulateur tactile devient portable
2008 : le stimulateur tactile devient portable
2010 : Le Stimtac est fin, léger et sobre
Une conception revue sur le plan énergétique a permis de réduire les pertes de puissance de 90%. En conséquence, la plaque tactile ne s’échauffe plus, ce qui permet à l’utilisateur de la manipuler pendant de longues périodes. De plus, la puissance consommée est suffisamment faible (0,5 W) pour permettre l’alimentation de l’ensemble directement par une prise USB. La mesure de la position du doigt et de la force d’appui est confiée à quatre capteurs de force au lieu du volumineux capteur optique, ce qui a permis l’intégration de l’ensemble dans un boitier de type « touchpad » externe.
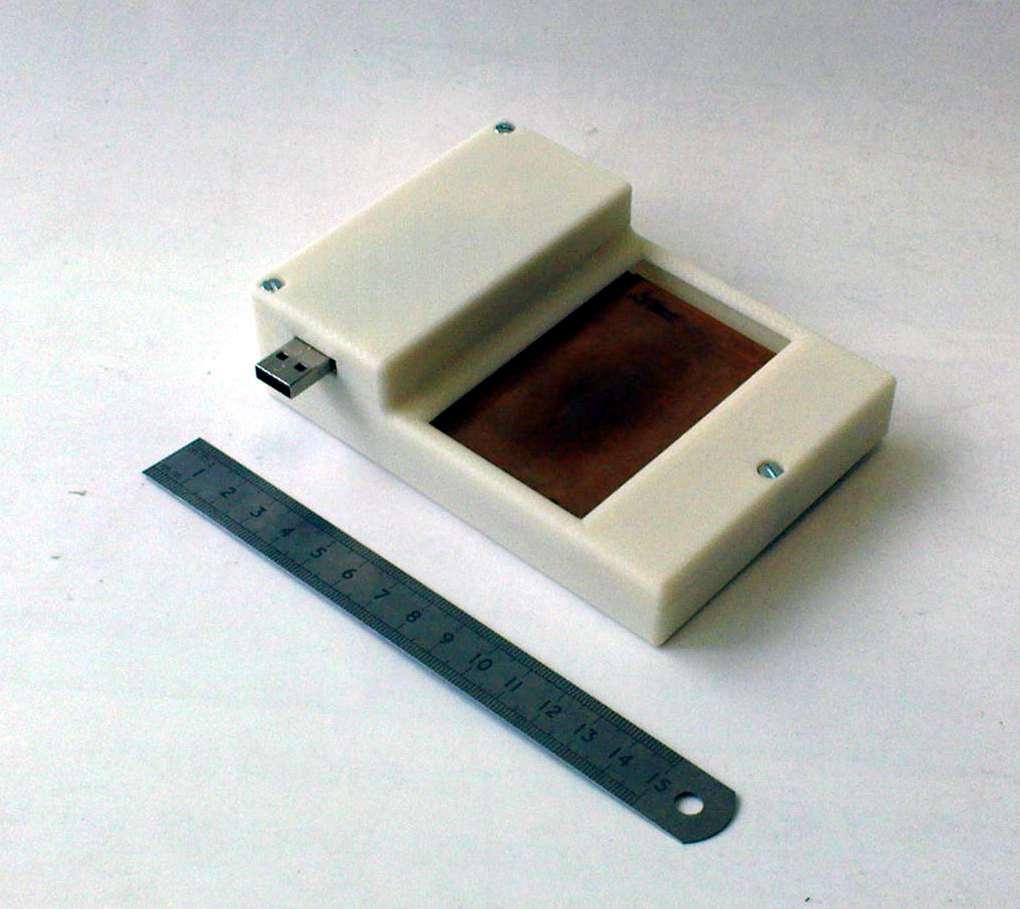 2010 : Amélioration de la consommation
2010 : Amélioration de la consommation
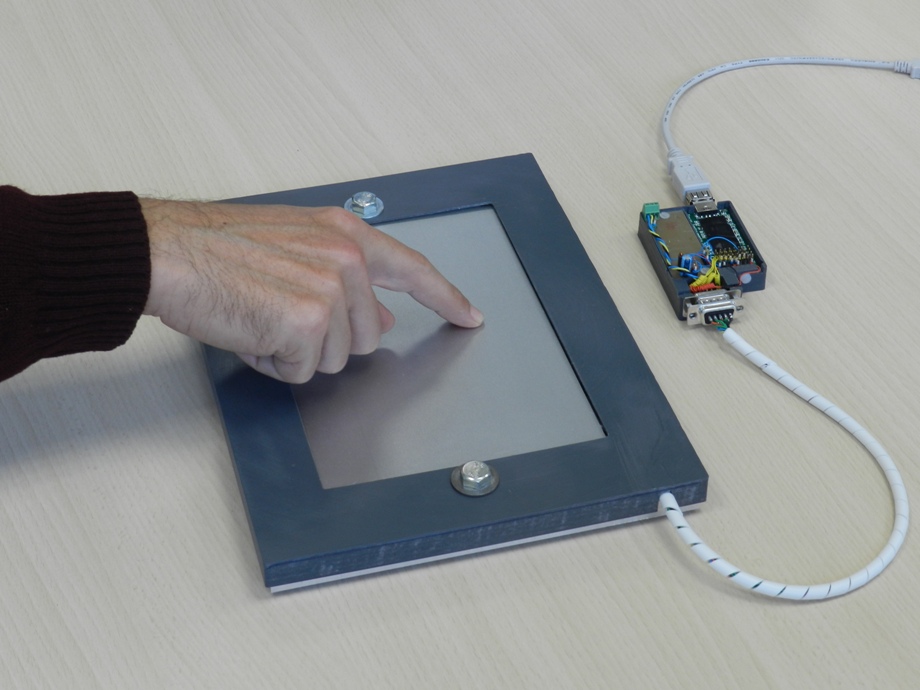
2011-2013 : Une série de 5 Stimtac Standalone
Sur la base du prototype précédent, une série de 5 stimulateurs tactiles quasiment identiques a été réalisée. Les fabrications les plus récentes ont remplacé le cuivre-béryllium initial par de l’aluminium, améliorant le coût et l’esthétique au prix d’une légère augmentation de la consommation.

2011 : 5 Standalone sont actuellement en circulation
2012 : La forme, la transparence, la taille
Des études sont actuellement en cours pour explorer des variations possibles sur ce thème. Par exemple, une version ronde permet un retour haptique lors d’une navigation d’une seule main, avec le pouce.
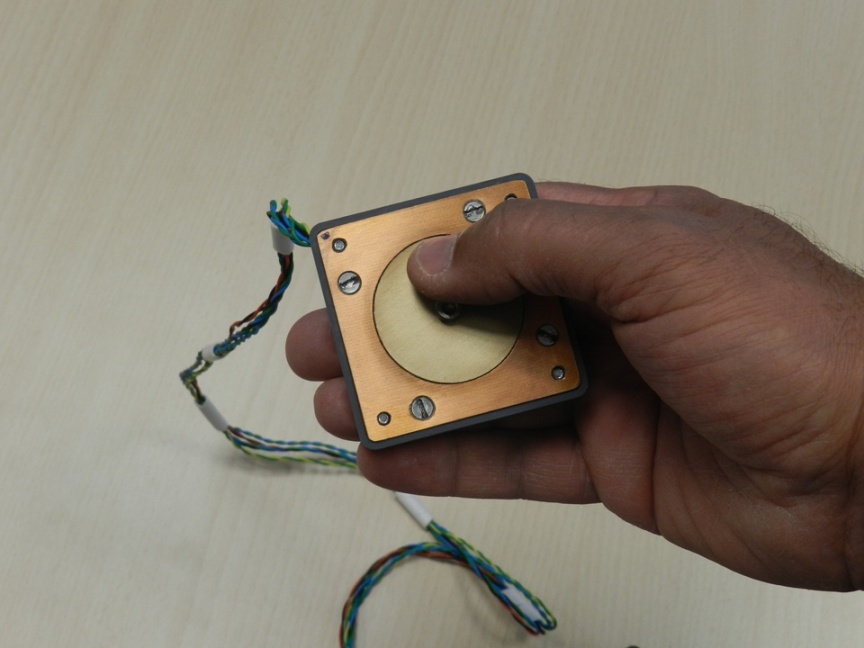 Une version ronde |
 Mode vibratoire radial exploité |
Une version miniature, embarquée sur le dos d’une souris, fait ressentir des crans comme une molette rotative, tout en permettant un défilement à deux directions.
 Une version miniature sur le dos d’une souris
Une version miniature sur le dos d’une souris
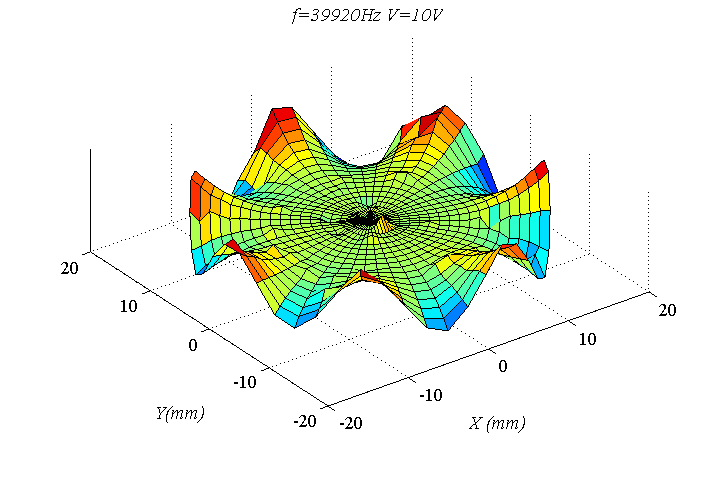
Une autre étude vise à augmenter les dimensions de la surface, tout en conservant une bonne homogénéité du ressenti et en maîtrisant la puissance consommée.
 Un grand standalone |
 et le relevé de son mode de vibration |
Et bien sûr, des efforts sont investis dans les applications transparentes, permettant de voir un écran à travers le résonateur. Celui-ci est alors du verre, et l’actionnement piézoélectrique s’est avéré totalement compatible avec des dalles tactiles multi-touch résistives ou capacitives.
 Une version transparente |
 Judicieusement animée, une dalle capacitive apporte le retour haptique |
Crédits photos : Ircica
BIBLIOGRAPHIE


